
旋轉編碼器的(de)原理(lǐ)是什(shén)麽?增量式編碼器和(hé)絕對(duì)式編碼器有什(shén)麽區(qū)别?
2021-6-4新聞

先給出結論,最重要的(de)區(qū)别在于:增量式編碼器沒有記憶,斷電重啓必須回到參考零位,才能找到需要的(de)位置,而絕對(duì)式編碼器,有記憶,斷電重啓不用(yòng)回到零位,即可(kě)知道目标所在的(de)位置。
接下(xià)來(lái)細說一下(xià),主要包含如下(xià)的(de)内容:
1.增量式旋轉編碼器的(de)工作原理(lǐ)是什(shén)麽?
2.絕對(duì)式旋轉編碼器的(de)工作原理(lǐ)是什(shén)麽?
3.增量式和(hé)絕對(duì)式旋轉編碼器有哪些不同?
4.單圈絕對(duì)式和(hé)多(duō)圈絕對(duì)式編碼器有什(shén)麽不同?
5.選擇編碼器,需要考慮的(de)最重要的(de)因素有哪3點?
6.編碼器的(de)實際應用(yòng)舉例。
1.電機屁股那點事
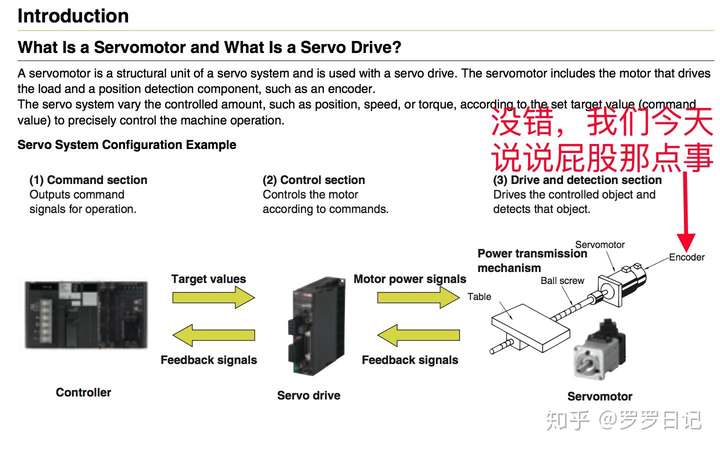
作爲機械設計人(rén)員(yuán),我們在選電機時(shí),非常注重電機的(de)扭矩和(hé)尺寸,因爲這(zhè)直接決定了(le)電機是否能按規定的(de)運動模式拖動負載,能不能很好地布置在有限的(de)空間之中。
但在精密機械設計中,其實還(hái)有一個(gè)和(hé)扭矩及尺寸同等重要的(de)參數,那就是分(fēn)辨率。
說起分(fēn)辨率,很多(duō)時(shí)候,在電機參數中,可(kě)以看到一組數據,例如2000Count/Turn=2000脈沖/圈,和(hé)17bit/33bit等。
對(duì)旋轉電機有所了(le)解的(de)朋友都知道,2000C/T,這(zhè)其實是說,這(zhè)個(gè)電機帶有一個(gè)增量式編碼器,轉一圈對(duì)應著(zhe)2000個(gè)脈沖,所以該編碼器的(de)分(fēn)辨率是360/2000=0.18度。
由于相對(duì)式編碼器通(tōng)常可(kě)以做(zuò)4倍頻(pín)(後面我會解釋爲什(shén)麽),所以2000C/T的(de)分(fēn)辨率可(kě)以變成0.18°/4=0.045度。
而17bit/33bit則是在說,這(zhè)個(gè)電機帶有一個(gè)17位的(de)多(duō)圈絕對(duì)編碼器。
那麽問題來(lái)了(le),絕對(duì)式編碼器和(hé)增量式編碼器原理(lǐ)上有什(shén)麽區(qū)别?應用(yòng)上有什(shén)麽區(qū)别?絕對(duì)式編碼器爲什(shén)麽用(yòng)二進制表示分(fēn)辨率?單圈和(hé)多(duō)圈絕對(duì)式編碼器有什(shén)麽區(qū)别?
我想,弄清楚這(zhè)幾個(gè)問題,對(duì)于電機或者需要用(yòng)到旋轉編碼器的(de)地方,心裏就不會像過去那樣模模糊糊,而是會清晰明(míng)了(le)地,直接選擇合适的(de)編碼器。
這(zhè)也(yě)是我本次理(lǐ)清編碼器這(zhè)個(gè)基本概念的(de)目的(de)。
2. 旋轉編碼器的(de)類型和(hé)優缺點
現在市面上通(tōng)常有三種編碼器:光(guāng)學編碼器(Optical Encoder),磁編碼器(Magnetic Encoder),和(hé)電容式編碼器(Capacitive Encoder)。
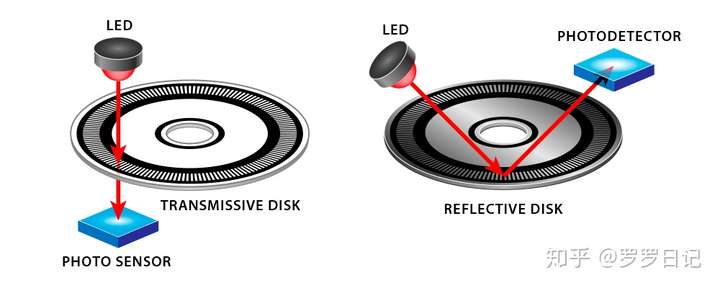
光(guāng)學編碼器是最常用(yòng),也(yě)是精度最高(gāo)的(de)一種,但同時(shí)其價格也(yě)最高(gāo)。
光(guāng)學編碼器相對(duì)磁和(hé)電容編碼器來(lái)說,更容易受到環境的(de)影(yǐng)響,比如在低溫下(xià)使用(yòng)光(guāng)學編碼器,如果環境溫度急劇上升,可(kě)能在光(guāng)學碼盤上形成凝霧,這(zhè)會導緻讀不到信号或者信号扭曲。
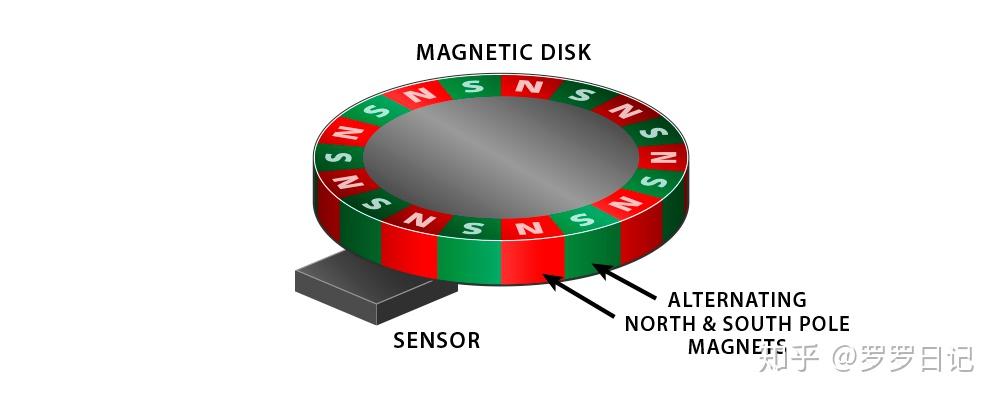
磁編碼器就不那麽容易受到環境的(de)影(yǐng)響,但是由于其天然的(de)非線性,磁編碼器不如光(guāng)學編碼器的(de)精度高(gāo)。它們通(tōng)常用(yòng)于灰塵,蒸汽,振動和(hé)其他(tā)可(kě)能幹擾光(guāng)學編碼器性能的(de)環境中。
同時(shí)在各種液體環境下(xià),磁編碼器也(yě)可(kě)以工作,磁編碼器使用(yòng)的(de)功耗也(yě)比光(guāng)學編碼器少。
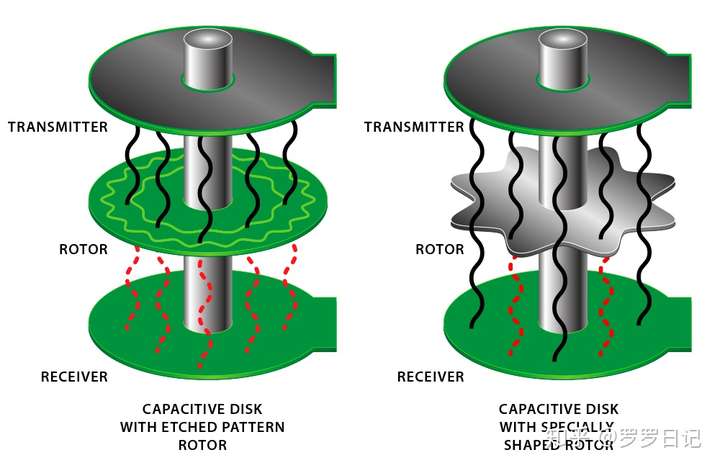
電容編碼器是工業自動化(huà)相對(duì)較新的(de)事物(wù),這(zhè)種編碼器與磁編碼器一樣耐環境,但也(yě)無法實現光(guāng)學編碼器的(de)高(gāo)分(fēn)辨率和(hé)準确性。
3. 增量式旋轉編碼器的(de)工作原理(lǐ)是什(shén)麽
要理(lǐ)解增量式編碼器(Incremental Encoder)和(hé)絕對(duì)式編碼器(Absolute Encoder)之間的(de)區(qū)别,首先要明(míng)白他(tā)們的(de)工作原理(lǐ),對(duì)嗎。
增量式編碼器的(de)工作原理(lǐ)是什(shén)麽?
這(zhè)裏以用(yòng)得(de)最多(duō)的(de)光(guāng)學編碼器爲例來(lái)說明(míng)。
先放一張圖。
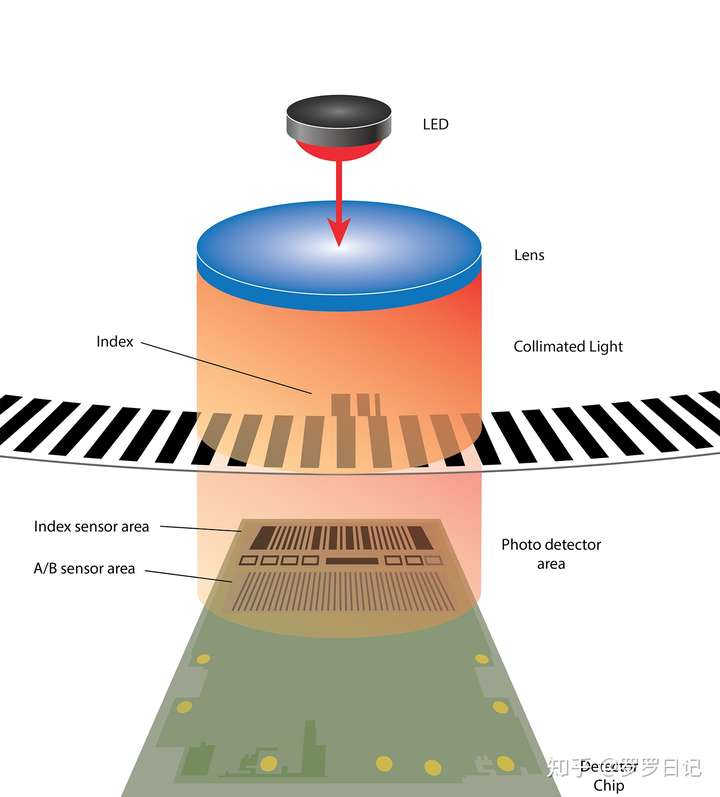
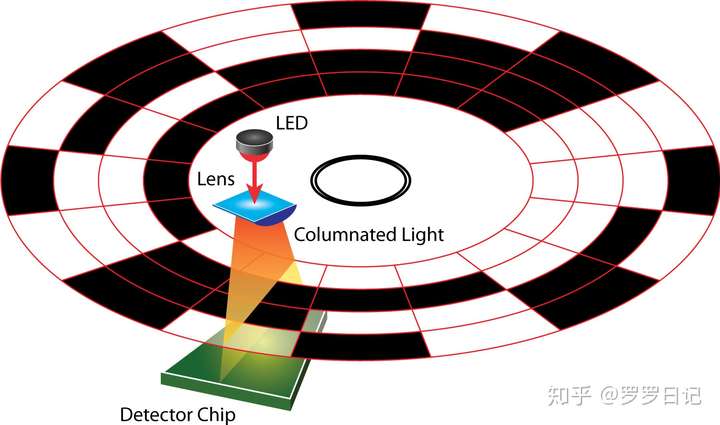
如上圖,該系統包含一個(gè)碼盤,以及位于碼盤一側的(de)LED光(guāng)源,和(hé)位于其另外一側的(de)光(guāng)電探測器芯片Detector Chip。
碼盤上有一系列的(de)黑(hēi)色标線和(hé)透明(míng)窗(chuāng)口,黑(hēi)色标線不透光(guāng),而窗(chuāng)口是可(kě)以透光(guāng)的(de)。
LED光(guāng)經過透鏡(Lens)後,形成平行光(guāng),打在碼盤上,光(guāng)線在黑(hēi)色刻線處被阻擋,而在透明(míng)窗(chuāng)口處穿過碼盤,照(zhào)射到下(xià)面的(de)感應器感應區(qū)域。
感應器上有兩個(gè)區(qū)域是可(kě)以感應信号的(de),一個(gè)是Index Sensor Area,也(yě)就是起始零位感應區(qū)域,一個(gè)是位置信号變化(huà)感應區(qū)域A/B Sensor Area。
零位感應也(yě)叫Home,有的(de)地方也(yě)叫Zero,把它探測所産生的(de)信号叫Z信号。
并不是所有的(de)增量式編碼器都有參考零位,比如有些傳送帶上的(de)應用(yòng)就不需要,而有的(de)增量式編碼器有不止一個(gè)參考零位,這(zhè)裏不過多(duō)地討(tǎo)論,感興趣的(de)可(kě)以自己去了(le)解一下(xià)。
LED光(guāng)線通(tōng)過碼盤窗(chuāng)口,透射到另外一側的(de)感應器感應區(qū)域。碼盤旋轉,固定的(de)感應器便可(kě)以讀取到光(guāng)的(de)這(zhè)種交替變化(huà)模式,進而将位置信息報告回機械系統。
感應器所産生的(de)波形如下(xià)圖,是重複的(de)方波(有的(de)編碼器傳送正弦波或者餘弦波),且高(gāo)電平和(hé)低電平占用(yòng)時(shí)間相同,因爲碼盤上的(de)不透明(míng)刻線和(hé)透明(míng)窗(chuāng)口間隔的(de)角度相同,一個(gè)黑(hēi)線和(hé)一個(gè)透明(míng)扇區(qū)域構成一個(gè)周期,對(duì)應著(zhe)波形圖中的(de)一個(gè)低電平和(hé)一個(gè)高(gāo)電平,也(yě)就是一個(gè)360度電周期。
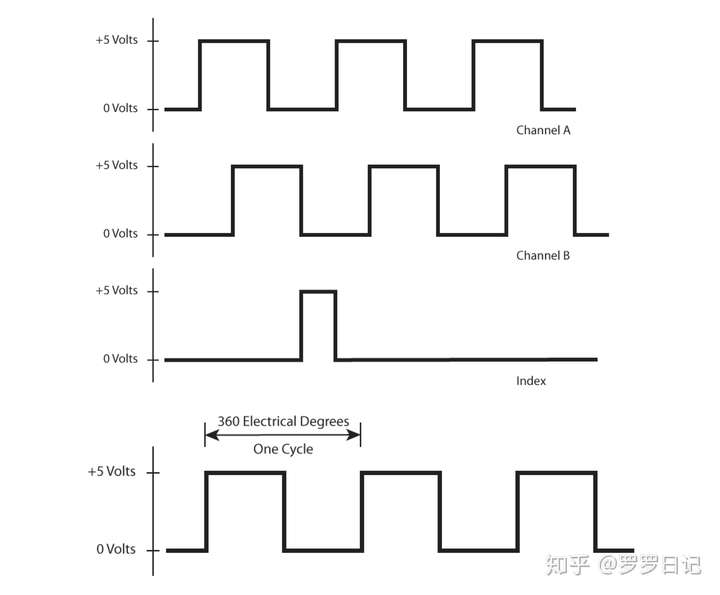
爲什(shén)麽波形圖中有兩個(gè)通(tōng)道,一個(gè)A,一個(gè)B?用(yòng)來(lái)幹什(shén)麽?
細心的(de)你,也(yě)許從剛剛前面那張圖就發現了(le),A/B Sensor Area就是産生兩個(gè)通(tōng)道信号的(de)原因。
怎麽解釋呢(ne),再來(lái)一張細節圖。
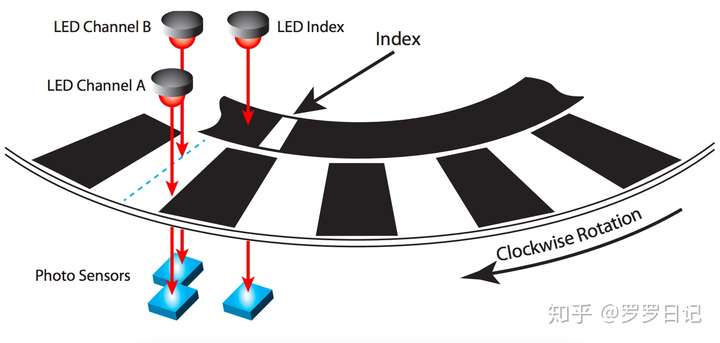
從上面這(zhè)張圖中可(kě)以看出,光(guāng)電感應器A和(hé)感應器B并沒有在同一半徑方向上,而是有一個(gè)角度錯位,錯位多(duō)少呢(ne),剛好是一個(gè)刻線所占據角度的(de)一半,也(yě)就是1/4物(wù)理(lǐ)周期。
我們知道,如果隻有一個(gè)感應器A,那麽當觸發零位後,感應器A就開始計數了(le),每經過一個(gè)黑(hēi)線和(hé)一個(gè)透明(míng)線,波形就形成一個(gè)低電平和(hé)一個(gè)高(gāo)電平,也(yě)就是一個(gè)周期,但是它并不知道碼盤的(de)旋轉方向,可(kě)能是逆時(shí)針旋轉,也(yě)可(kě)能是順時(shí)針旋轉。
所以,感應器B加入的(de)目的(de)就很明(míng)顯了(le):和(hé)感應器A配合,用(yòng)于判斷碼盤的(de)旋轉方向。
因爲A和(hé)B錯位1/4物(wù)理(lǐ)周期,(也(yě)就是相差90度電脈沖周期,所以也(yě)叫做(zuò)正交脈沖,英文是Quadrature,我們常聽(tīng)到的(de)A-Quad-B就是從這(zhè)兒(ér)來(lái)的(de)),所以光(guāng)線會先後透射過透明(míng)窗(chuāng)口,打在感應器A和(hé)B上,形成1/4個(gè)周期差。
例如,如果順時(shí)針旋轉,A領先于B四分(fēn)之一周期,那麽逆時(shí)針旋轉,A必然滞後于B四分(fēn)之一周期。從而可(kě)以根據A領先于B,還(hái)是滞後于B來(lái)判斷旋轉方向。
OK,到這(zhè)裏,我們理(lǐ)解了(le)增量式編碼器的(de)工作原理(lǐ):通(tōng)過Index找到零位,通(tōng)過脈沖數目計算(suàn)旋轉角度,通(tōng)過AB通(tōng)道的(de)相對(duì)滞後性判斷旋轉方向,通(tōng)過波形所占據的(de)時(shí)間,或者波的(de)脈沖頻(pín)率來(lái)判斷速度。
再仔細想一下(xià),AB通(tōng)道相差1/4周期,還(hái)可(kě)以用(yòng)來(lái)幹什(shén)麽?
或許你已經猜到,就是我在一開始就說到的(de)4倍頻(pín)(倍乘)分(fēn)辨率。
怎麽實現呢(ne)?
看波形圖吧。
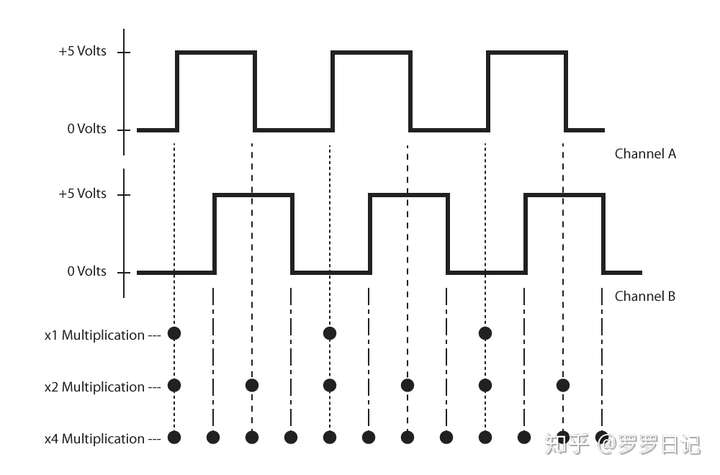
這(zhè)裏,以每圈100個(gè)物(wù)理(lǐ)周期碼盤來(lái)舉例。
一倍乘X1:碼盤旋轉時(shí),如果我們計算(suàn)通(tōng)道A脈沖的(de)每個(gè)上升沿(由0變成5V),則每轉将獲得(de)100個(gè)脈沖。
2倍乘X2:碼盤旋轉時(shí),如果我們計算(suàn)通(tōng)道A的(de)每個(gè)上升沿和(hé)每個(gè)下(xià)降沿(由5V變成0),則每個(gè)周期将獲得(de)2個(gè)脈沖,每轉總計200個(gè)脈沖。
4倍乘X4:如果我們計算(suàn)通(tōng)道A和(hé)通(tōng)道B的(de)每個(gè)上升沿和(hé)下(xià)降沿,則每個(gè)物(wù)理(lǐ)周期将獲得(de)4個(gè)脈沖,每轉總計400個(gè)脈沖。
因爲增量式編碼器的(de)物(wù)理(lǐ)刻線相距角度一樣,本質上來(lái)說,它是通(tōng)過計算(suàn)脈沖數量,來(lái)計算(suàn)旋轉角度的(de)。
同樣的(de)一圈,不同的(de)倍頻(pín)法得(de)到的(de)每圈脈沖數不同,顯然4倍頻(pín)得(de)到的(de)分(fēn)辨率最高(gāo)。
這(zhè)就是分(fēn)辨率4倍頻(pín)的(de)原理(lǐ)。
所以2000C/T的(de)分(fēn)辨率可(kě)以變成0.18°/4=0.045度。
但是需要明(míng)白的(de)是,這(zhè)個(gè)4倍乘,并沒有改變碼盤的(de)物(wù)理(lǐ)刻線之間的(de)角度,僅僅是電脈沖數量的(de)變化(huà),而且這(zhè)個(gè)倍乘通(tōng)常是在控制器或者計數器中完成的(de),信号質量好,可(kě)靠。
如果在不改變碼盤條件下(xià),還(hái)想獲得(de)更高(gāo)的(de)分(fēn)辨率,怎麽辦?
可(kě)以用(yòng)Interpolation,也(yě)就是信号插值。
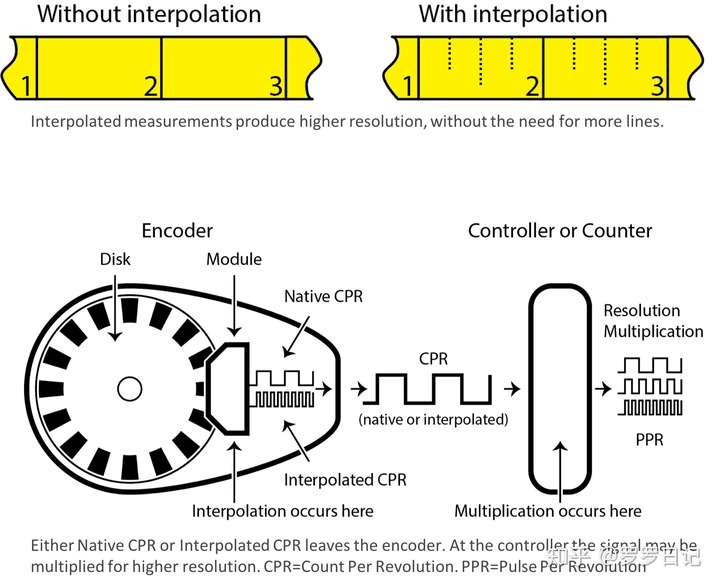
插值的(de)含義是什(shén)麽呢(ne)?我理(lǐ)解得(de)也(yě)不是很多(duō),但是數學上來(lái)說,插值就是通(tōng)過已知的(de)數據,去預測未知的(de)數據。
在編碼器應用(yòng)中,因爲實際的(de)位置,可(kě)能位于黑(hēi)色刻線和(hé)透明(míng)窗(chuāng)口之間,插值就可(kě)以得(de)到這(zhè)些位置的(de)值,從而獲得(de)更高(gāo)的(de)分(fēn)辨率。
理(lǐ)論上,插值可(kě)以獲得(de)無限的(de)分(fēn)辨率,但是過高(gāo)的(de)插值也(yě)會引入新的(de)問題,例如信号容易受到電噪聲的(de)影(yǐng)響從而降低精度,需要與之相匹配的(de)驅動和(hé)控制器,大(dà)量的(de)數據處理(lǐ)需要花費更多(duō)的(de)時(shí)間,需要更快(kuài)的(de)響應等。
目前,我在某供應商的(de)産品目錄中,看到最高(gāo)的(de)插值倍數是20000倍,分(fēn)辨率達到0.002arcsec。當然,這(zhè)個(gè)碼盤也(yě)很大(dà),外徑達到206mm,一圈的(de)物(wù)理(lǐ)周期是32400(也(yě)就是32400 Line Count)。
這(zhè)個(gè)碼盤的(de)物(wù)理(lǐ)分(fēn)辨率是:360/32400=0.01111°,插值後分(fēn)辨率是:0.01111/20000*3600=0.002arcsec,這(zhè)裏除以3600是單位的(de)換算(suàn)。這(zhè)款編碼器安裝後能實現的(de)精度是±1arcsec=±1/3600°。
4. 絕對(duì)式旋轉編碼器的(de)工作原理(lǐ)是什(shén)麽?
絕對(duì)式編碼器的(de)工作原理(lǐ)和(hé)增量式有所不同。
怎麽個(gè)不同法?
分(fēn)餅遊戲開始了(le)。
還(hái)是先看一張圖。
這(zhè)個(gè)圖是一個(gè)16位絕對(duì)式編碼器示意圖。整圈被分(fēn)成了(le)16份,也(yě)就是有16個(gè)扇區(qū)。
它和(hé)增量式編碼器的(de)圖相似,但是又有一點不一樣:在半徑方向上,每一個(gè)扇區(qū)又被分(fēn)成了(le)4份。
LED光(guāng)從碼盤一側照(zhào)射下(xià)來(lái),相應地,在碼盤另外一側有一個(gè)探測芯片,探測芯片有4個(gè)感應區(qū),每個(gè)感應區(qū),可(kě)以獲取同一個(gè)扇區(qū)每一份的(de)狀态。
透明(míng)的(de)窗(chuāng)口,光(guāng)線穿過去,感應區(qū)感應到信号,不透明(míng)的(de)區(qū)域,光(guāng)線無法穿過,感應區(qū)無法感應到。
如果把有感應和(hé)無感應看成是兩種狀态,分(fēn)别用(yòng)1和(hé)0表示,那麽每一個(gè)感應區(qū)可(kě)以表示2種狀态。
進而,同一個(gè)扇區(qū)中這(zhè)4份(4位),可(kě)以表示2^4=16種狀态,這(zhè)也(yě)是爲什(shén)麽這(zhè)個(gè)碼盤在圓周方向上被分(fēn)爲了(le)16份,其實相當于對(duì)每一個(gè)位置進行了(le)編碼,每個(gè)編碼對(duì)應著(zhe)一個(gè)特定的(de)位置。
可(kě)能你也(yě)想問,能不能在半徑方向分(fēn)4份,而在圓周方向多(duō)分(fēn)幾份。多(duō)分(fēn)沒有意義,因爲半徑方向隻有4位,無法表示更多(duō)的(de)位置。少分(fēn)又不能充分(fēn)利用(yòng)好感應到的(de)狀态總數,所以分(fēn)成2^4=16份剛剛好。
比如下(xià)面這(zhè)幅圖,從左到右可(kě)以分(fēn)别表示0001, 0101, 1100,用(yòng)十進制表示就是第1, 第5,第12個(gè)位置。
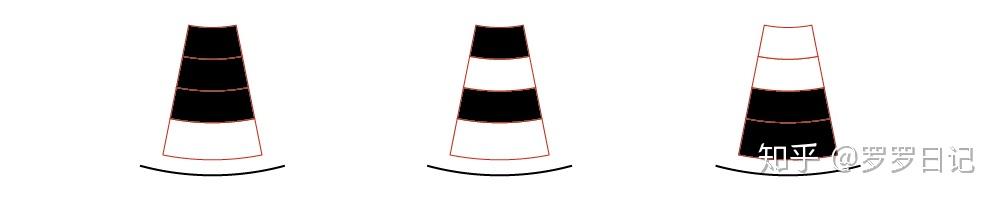
0101轉換成10進制:0*2^3+1*2^2+0*2^1+1*2^0=5。1100轉換成10進制:1*2^3+1*2^2+0*2^1+0*2^0=12。
到這(zhè)裏,我們基本上明(míng)白了(le)絕對(duì)式編碼器的(de)原理(lǐ):對(duì)每一個(gè)位置,給定一個(gè)唯一的(de)編碼,再用(yòng)傳感器去識别每個(gè)位置的(de)編碼,輸出與之相對(duì)應的(de)唯一信号,用(yòng)來(lái)表示特定的(de)位置。
如果要獲得(de)更高(gāo)的(de)分(fēn)辨率,那麽就需要更多(duō)的(de)編碼位數,也(yě)就是需要在圓周方向上,刻上更多(duō)的(de)特定編碼(這(zhè)通(tōng)常都會加大(dà)碼盤)。
比如需要17位,也(yě)就是2^17=131072個(gè)位置,那麽就需要131072個(gè)不同的(de)編碼,這(zhè)時(shí)的(de)分(fēn)辨率是360/131072=0.00275°。
當然,并不是每個(gè)廠家的(de)編碼方法,都和(hé)上面這(zhè)個(gè)例子一樣。有的(de)廠家不在半徑方向上劃分(fēn),隻在圓周方向上劃分(fēn),但是基本理(lǐ)念是一樣的(de),就是用(yòng)唯一的(de)編碼表示唯一的(de)位置。
這(zhè)就是絕對(duì)式編碼器的(de)核心思想。
剛剛說完了(le)編碼方法,那麽絕對(duì)式編碼器輸出的(de)波形圖和(hé)增量式有什(shén)麽不同呢(ne)?
還(hái)是以光(guāng)學絕對(duì)編碼器爲例來(lái)說明(míng),一個(gè)典型的(de)絕對(duì)編碼器輸出波形如下(xià),右圖。
這(zhè)裏使用(yòng)的(de)是脈沖帶寬調制(PWM=Pulse Width Modulation)。
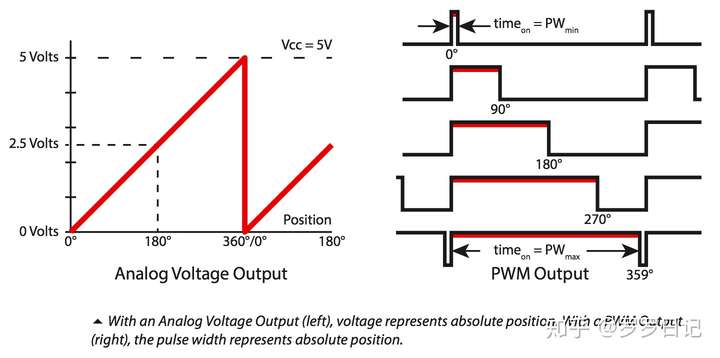
一個(gè)10位絕對(duì)編碼器可(kě)以輸出2^10=1024個(gè)獨特編碼,在圖中怎麽表示每一個(gè)特定的(de)位置呢(ne)?
用(yòng)脈沖寬度來(lái)表示。
例如,起始零位,用(yòng)一個(gè)最小的(de)脈沖寬度1微秒來(lái)表示這(zhè)個(gè)位置。在180°,用(yòng)512微秒的(de)脈沖帶寬來(lái)表示。
類似地,對(duì)于其他(tā)的(de)位置,用(yòng)不同的(de)脈沖寬度來(lái)表示,當碼盤旋轉,越來(lái)越長(cháng)的(de)脈沖帶寬被傳遞。
順便說一下(xià),上圖左邊,是一個(gè)絕對(duì)式磁編碼器的(de)波形圖,它是用(yòng)電壓的(de)高(gāo)低來(lái)表示不同的(de)位置。
這(zhè)些波形信息,按照(zhào)控制系統的(de)配置,可(kě)以通(tōng)過不同的(de)通(tōng)信接口,傳遞給控制器,用(yòng)來(lái)做(zuò)反饋控制。
5. 絕對(duì)式單圈和(hé)多(duō)圈編碼器有什(shén)麽不同?
絕對(duì)式編碼器又分(fēn)爲單圈和(hé)多(duō)圈,即Single-Turn Absolute Encoder和(hé)Multi-Turn Absolute Encoder。
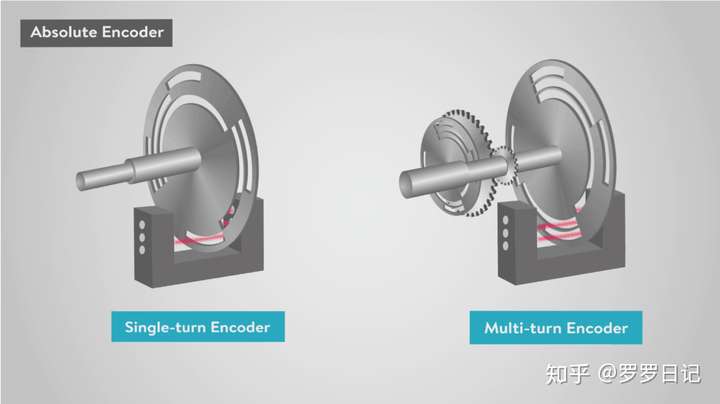
單圈很好理(lǐ)解,就像鐘(zhōng)表中隻有分(fēn)針,一圈一圈地不停轉,60分(fēn)鐘(zhōng)之後,表重置,并不記錄旋轉的(de)圈數,在這(zhè)裏,也(yě)就是不知道是幾個(gè)小時(shí)。
多(duō)圈,就像是鐘(zhōng)表中即有分(fēn)針,還(hái)有時(shí)針。在任何時(shí)刻,分(fēn)鐘(zhōng)和(hé)小時(shí)數都可(kě)以被讀取。
所以多(duō)圈編碼器可(kě)以記錄很多(duō)很多(duō)圈。
實際的(de)多(duō)圈編碼器,常用(yòng)3種方法來(lái)實現圈數記錄。
第一種,就像上面那張圖一樣,在編碼器内部,用(yòng)機械齒輪耦合多(duō)個(gè)軸,用(yòng)來(lái)計算(suàn)總的(de)圈數,這(zhè)種方法,因爲用(yòng)到了(le)機械齒輪,所以會帶來(lái)磨損,使得(de)精度降低,同時(shí)機械齒輪會占用(yòng)很多(duō)空間,所以編碼器尺寸偏大(dà)。
第二種,就是用(yòng)電子計數器和(hé)電容器,來(lái)計算(suàn)總共轉過的(de)圈數,但是代價是需要在編碼器内部安裝電池,而且需要定期檢查電池。
第三種,在一些磁編碼器中,采用(yòng)韋根金線(Wiegand wire),并利用(yòng)韋根效應來(lái)計數(Wiegand effect)。這(zhè)種編碼器沒有太多(duō)機械結構件,可(kě)以做(zuò)得(de)很小。
韋根效應,也(yě)是我在了(le)解編碼器的(de)過程中才知道的(de),所以多(duō)做(zuò)一點說明(míng)。
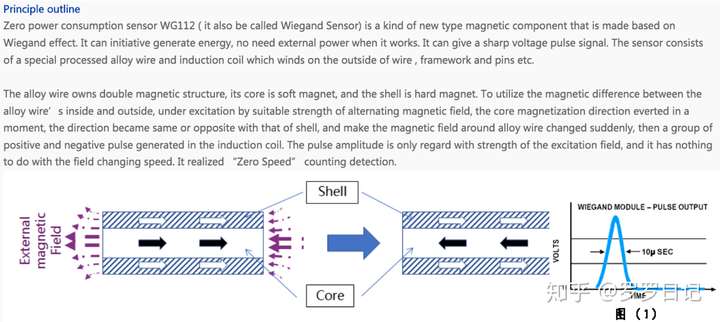
韋根金線,它由一種特殊的(de)合金制成,具有硬磁(永磁,不易退磁)的(de)金屬外殼和(hé)軟磁(容易退磁和(hé)磁化(huà))的(de)金屬芯。韋根線表現出具有兩個(gè)明(míng)顯不連續的(de)磁滞曲線,稱爲韋根效應。
在适當磁場(chǎng)強度的(de)作用(yòng)下(xià),韋根線芯磁場(chǎng)會反向,其磁場(chǎng)和(hé)和(hé)外硬層相同或者相反,讓處在附近的(de)線圈産生一個(gè)脈沖,該脈沖的(de)大(dà)小和(hé)形狀與外部磁場(chǎng)變化(huà)的(de)速度無關,磁編碼器就是利用(yòng)這(zhè)個(gè)脈沖來(lái)記錄轉動的(de)圈數,并把數據寫入穩定的(de)存儲器中。
當然,單圈編碼器也(yě)可(kě)以通(tōng)過信号重複的(de)次數,來(lái)計算(suàn)旋轉的(de)圈數,但是就沒有多(duō)圈編碼器那麽直接。
單圈編碼器,如果轉了(le)超過一圈,斷電重啓後,不知道轉了(le)幾圈,也(yě)就是說,不知道絕對(duì)位置的(de)。
這(zhè)個(gè)特性,決定了(le)單圈絕對(duì)編碼器隻适用(yòng)于開機需要絕對(duì)位置,但是在運轉過程中,旋轉不滿一圈的(de)應用(yòng)中。
而多(duō)圈編碼器,是有圈數物(wù)理(lǐ)絕對(duì)位置記錄的(de),所以,多(duō)圈相對(duì)于單圈可(kě)以獲得(de)更長(cháng)更遠(yuǎn)的(de)絕對(duì)位置。
但是與此同時(shí),關于多(duō)圈編碼器,又出現了(le)一個(gè)新的(de)問題。
如果旋轉的(de)圈數超過了(le)它的(de)總記錄容量會發生什(shén)麽?
這(zhè)時(shí),圈數會溢出,要麽重新計數,要麽驅動器和(hé)控制器提供一種特殊的(de)位置跟蹤,稱爲“模數定位”,它可(kě)以存儲任何溢出運動,即超出記錄圈數的(de)旋轉部分(fēn),并使用(yòng)此信息提供準确的(de)定位。
到此,我們重新理(lǐ)解了(le)單圈和(hé)多(duō)圈編碼器的(de)區(qū)别:單圈隻能記錄一圈之内的(de)運動,多(duō)圈可(kě)以記錄很長(cháng)的(de)旋轉或者直線位移。
好了(le)。
現在我們回過頭去看一下(xià),在文章(zhāng)一開始就提到的(de)17bit/33bit。
這(zhè)是什(shén)麽含義?相信你從上面的(de)解釋中,已經明(míng)白了(le)。
17bit/33bit的(de)含義是:17bit就是說每轉一圈有2^17=131072個(gè)脈沖,而33bit表示總共的(de)脈沖位數是2^33=2^17*2^16,那麽這(zhè)個(gè)多(duō)圈編碼器可(kě)以記錄33-17=16bit=2^16=65536圈。
這(zhè)裏計算(suàn)分(fēn)辨率要注意,它的(de)分(fēn)辨率隻和(hé)一圈的(de)脈沖數有關,而和(hé)總的(de)圈數無關,也(yě)就是說這(zhè)個(gè)編碼器的(de)分(fēn)辨率是360/131072=0.00275度。
如果一個(gè)馬達使用(yòng)了(le)這(zhè)個(gè)編碼器,用(yòng)此馬達驅動滾珠絲杠,運動一圈前進5毫米,那麽理(lǐ)論上的(de)分(fēn)辨率就是:5mm/131072cnt=0.038um/cnt。
當然,實際分(fēn)辨率肯定要比這(zhè)個(gè)低,畢竟滾珠絲杠系統也(yě)是有間隙的(de),而且大(dà)多(duō)數時(shí)候,機械系統的(de)間隙才是整個(gè)系統的(de)短闆。
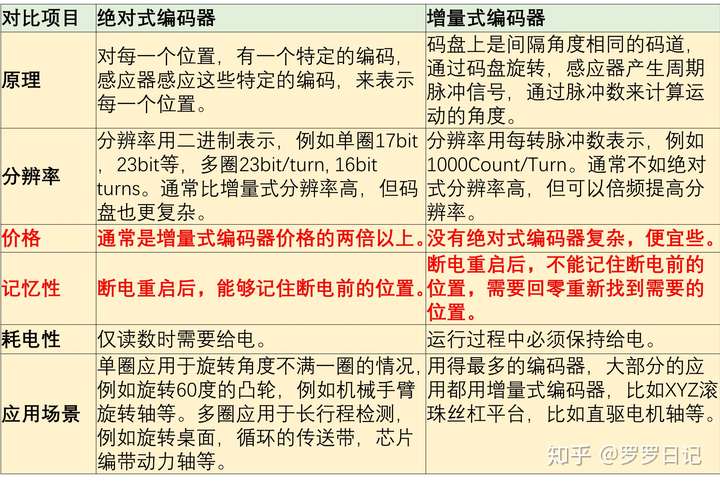
6. 增量式編碼器和(hé)絕對(duì)式編碼器有什(shén)麽不同?包括原理(lǐ),價格,應用(yòng)等
通(tōng)過上面的(de)解釋,我們理(lǐ)解了(le)增量和(hé)絕對(duì)式兩種旋轉編碼器的(de)工作原理(lǐ)。
絕對(duì)式旋轉編碼器的(de)原理(lǐ)和(hé)增量式的(de)原理(lǐ)類似,都是通(tōng)過傳感器來(lái)讀取碼盤上明(míng)暗相間的(de)刻線獲得(de)脈沖,根據脈沖數目來(lái)表示位置。
不同的(de)是,絕對(duì)式編碼器,斷電可(kě)以記住當前位置,即使斷電後有機械移位,通(tōng)電後也(yě)知道移動到哪裏去了(le),因爲絕對(duì)式編碼器對(duì)每一個(gè)位置,有一個(gè)唯一的(de)編碼。
而增量式編碼器不同,它沒有記憶,斷電後重啓,需要找到參考點後,才能找回需要的(de)位置。
增量式編碼器很适合用(yòng)于确定速度,距離或運動方向。
如果需要在斷電重啓時(shí)就知道位置,那麽就需要絕對(duì)式編碼器了(le)。
例如,如果你要設計機械臂,在斷電後可(kě)能沒有足夠的(de)空間或靈活性,使其無法移動到原始位置,在這(zhè)種情況下(xià),需要使用(yòng)絕對(duì)編碼器。
這(zhè)是從技術角度說明(míng)兩者的(de)不同。
但是其實從成本,應用(yòng)方面來(lái)看,兩者也(yě)有不同之處,我就不多(duō)探討(tǎo)了(le),直接給出結果。
有如下(xià)的(de)這(zhè)個(gè)表格:
7. 選擇編碼器,最重要的(de)參考因素有哪3點?
1. 開機是否需要知道絕對(duì)位置,用(yòng)來(lái)決定選擇增量式還(hái)是絕對(duì)式。實際運行過程中可(kě)能的(de)旋轉圈數,用(yòng)來(lái)決定多(duō)圈還(hái)是單圈編碼器。
2. 精度要求,分(fēn)辨率要求,決定編碼器的(de)分(fēn)辨率選擇。
3. 最大(dà)速度。分(fēn)辨率選定,需要結合最大(dà)速度計算(suàn)編碼器産生信号的(de)頻(pín)率。編碼器輸出的(de)頻(pín)率,需要比控制器或者計數器能夠接受的(de)最大(dà)輸入頻(pín)率低,否則需要重新選擇編碼器,重新匹配。另外編碼器本身也(yě)有最大(dà)轉速要求。
4. 價格。結合預算(suàn)考慮價格。
5. 安裝方式。軸孔安裝,空間大(dà)小評估,安裝公差要求,出線的(de)方向等。
6. 外圍環境。灰塵,濕度,溫度,振動,電磁環境等,決定編碼器的(de)選擇類型和(hé)信号線的(de)屏蔽等,例如選擇光(guāng)學式,還(hái)是磁式,還(hái)是電容式,選擇屏蔽線還(hái)是非屏蔽線等。
當然,實際選擇時(shí),如果有不太确定的(de)地方,一定有一個(gè)辦法可(kě)以幫你解決問題。
那就是聯系你的(de)供應商,說出你的(de)問題,畢竟他(tā)們是專業的(de),很多(duō)時(shí)候,他(tā)們可(kě)以給你一些很好的(de)選擇建議(yì),這(zhè)個(gè)時(shí)候,往往也(yě)是很好的(de)學習(xí)機會。
關于編碼器,如果要深挖的(de)話(huà),還(hái)有很多(duō)話(huà)題的(de),比如噪聲的(de)來(lái)源,如何控制噪聲等。
但是限于主題和(hé)篇幅,今天就到這(zhè)裏吧。
