
讀懂(dǒng)編碼器的(de)工作原理(lǐ)及增量型編碼器
2020-9-24新聞
在現場(chǎng)的(de)工業控制中,經常要使用(yòng)到編碼器。什(shén)麽是編碼器?它又是如何工作的(de)呢(ne)?今天這(zhè)篇文章(zhāng)我們就來(lái)聊聊編碼器的(de)工作原理(lǐ)并詳細討(tǎo)論下(xià)增量型編碼器。
編碼器,英文名稱“encoder”,它是一種能把距離(直線位移)和(hé)角度(角位移)轉換成電信号并輸出的(de)傳感器。編碼器通(tōng)常用(yòng)于工業的(de)運動控制中,用(yòng)于測量并反饋被測物(wù)體的(de)位置和(hé)狀态,如機床、機器人(rén)、電機反饋系統以及測量和(hé)控制設備等。
根據工作原理(lǐ)的(de)不同,編碼器可(kě)分(fēn)爲光(guāng)電編碼器(optical encoder)、磁性編碼器(magnetic encoder)、電感式編碼器(inductive encoder)和(hé)電容式編碼(capacitive encoder)等等,使用(yòng)最多(duō)的(de)是光(guāng)電編碼器。
光(guāng)電編碼器(optical encoder)的(de)組成包括:連接軸(Shaft),碼盤(Code disk),光(guāng)源(Light Source),輸出電路(Output circuit)及外殼和(hé)連接法蘭等,如下(xià)圖:
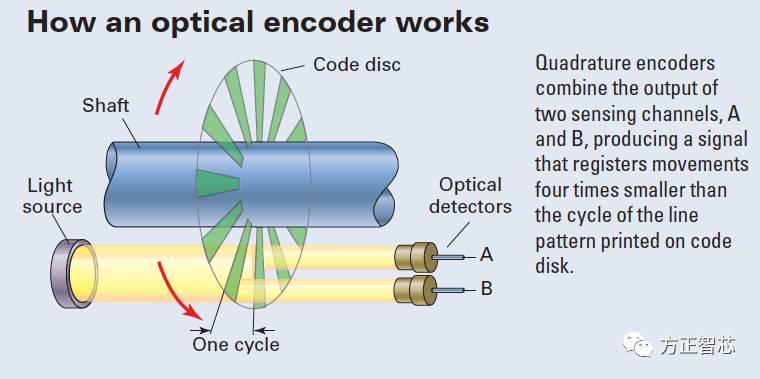
連接軸與碼盤相連,并與被測物(wù)體相連,随著(zhe)被測物(wù)體(如電機)的(de)轉動,碼盤也(yě)跟著(zhe)轉動,通(tōng)過碼盤的(de)光(guāng)會發生明(míng)暗相間的(de)變化(huà),接收端的(de)光(guāng)敏元件會檢測到這(zhè)種變化(huà),并轉化(huà)成電信号進行輸出。
根據碼盤結構的(de)不同,編碼器又可(kě)以分(fēn)爲增量型編碼器和(hé)絕對(duì)編碼器,這(zhè)篇文章(zhāng)我們主要討(tǎo)論增量型編碼器。
增量型編碼器,英文名稱“Incremental encoder”,它的(de)碼盤被分(fēn)成大(dà)小相等的(de)明(míng)暗相間的(de)光(guāng)栅,随著(zhe)碼盤的(de)轉動,接收端會檢測到光(guāng)的(de)0和(hé)1的(de)變化(huà),并轉換成電信号脈沖向外輸出。通(tōng)過對(duì)脈沖的(de)計數,就能确定位移的(de)大(dà)小,如下(xià)圖:

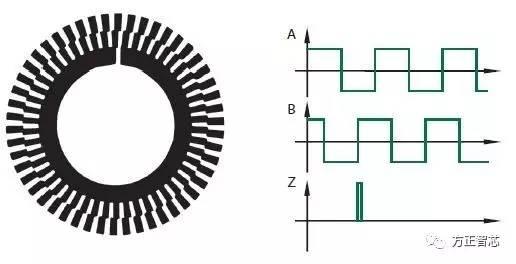
爲了(le)區(qū)分(fēn)正反轉及檢測零點,實際使用(yòng)的(de)碼盤比上圖要複雜(zá)些,通(tōng)常包括三個(gè)部分(fēn):A相,B相和(hé)Z相,A相與B相相差1/4周期(相位差90度),可(kě)以用(yòng)來(lái)區(qū)分(fēn)正轉還(hái)是反轉;Z相爲單圈脈沖,碼盤轉一圈産生一次,可(kě)以用(yòng)作編碼器的(de)參考零位,如下(xià)圖:
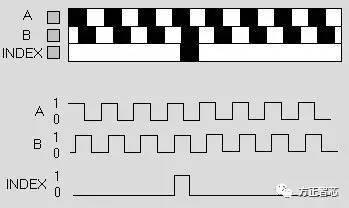
增量型編碼器的(de)輸出波形如下(xià)圖:
由于采用(yòng)脈沖計數的(de)方式,增量型編碼器在測量前必須先尋找參考零位,因此它的(de)測量結果是相對(duì)的(de)。另外增量型編碼器的(de)數據斷電後會丢失。
